Qu'est-ce qu'un moteur à induction et comment fonctionne-t-il
Le moteur à induction est simple et fiable et c'est pourquoi il est très souvent utilisé dans la production et dans les appareils électroménagers, de l'entraînement de la vanne à la rotation du tambour dans la machine à laver. Dans cet article, nous vous expliquerons en termes simples ce que sont les moteurs électriques asynchrones, de quoi s'agit-il et comment fonctionne ce type de machines électriques.
Espèce
Les moteurs à induction (AM) sont divisés en deux groupes principaux:
- rotor à cage d'écureuil
- avec un rotor de phase.
Si nous omettons les nuances, la différence est que le moteur du rotor à cage d'écureuil n'a pas de balais et d'enroulements prononcés, il est moins exigeant en maintenance. Alors que dans les moteurs asynchrones à rotor de phase, il y a trois enroulements connectés à des bagues collectrices, dont le courant est éliminé par des balais. Contrairement au précédent, il est préférable de contrôler le couple sur l'arbre et il est plus facile de réaliser un démarrage en douceur pour réduire les courants d'appel.
Les autres moteurs classent:
- par le nombre de phases d'alimentation - monophasé et biphasé (utilisé dans la vie quotidienne lorsqu'il est alimenté par un réseau 220V), et triphasé (le plus largement utilisé dans la production et dans les ateliers).
- par fixation - bride ou sur pattes.
- par mode de fonctionnement - pour un mode long, court terme ou court terme répété.
Et un certain nombre d'autres facteurs qui affectent le choix d'un produit particulier à utiliser dans des conditions spécifiques.
On peut en dire long sur les moteurs électriques monophasés: certains d'entre eux sont lancés via un condensateur, et certains nécessitent une capacité de démarrage et de travail. Il existe également des options avec un virage en court-circuit, qui fonctionnent sans condensateur et sont utilisées, par exemple, dans les hottes. Si vous êtes intéressé, écrivez dans les commentaires et nous écrirons un article à ce sujet.
Dispositif
Par définition, «asynchrone» fait référence à un moteur à courant alternatif dans lequel le rotor tourne plus lentement que le champ magnétique du stator, c'est-à-dire de manière asynchrone. Mais cette définition n'est pas trop informative. Pour le comprendre, vous devez comprendre comment ce moteur est conçu.
Un moteur à induction, comme tout autre, se compose de deux parties principales - rotor et stator. «Pour les nuls» en électricité, nous déchiffrons:
- Le stator est appelé la partie fixe de tout générateur ou moteur électrique.
- Le rotor est appelé la partie tournante du moteur, qui entraîne les mécanismes.

Le stator se compose d'un boîtier dont les extrémités sont fermées par des boucliers de roulement dans lesquels les roulements sont installés. Selon le but et la puissance du moteur, des roulements à billes ou à roulement sont utilisés. Le noyau est situé dans le boîtier, un enroulement est installé dessus. Il s'agit d'un enroulement statorique.

Le courant étant alternatif pour réduire les pertes dues aux courants parasites (Courants de Foucault) le noyau du stator est tiré de fines plaques d'acier isolées les unes des autres par de la calamine et collées avec du vernis.Une tension d'alimentation est fournie aux enroulements du stator, le courant qui y circule est appelé courant du stator.
Le nombre d'enroulements dépend du nombre de phases d'alimentation et de la conception du moteur. Ainsi, un moteur triphasé a au moins trois enroulements reliés par un schéma en étoile ou en triangle. Leur nombre peut être plus important, et cela affecte la vitesse de rotation de l'arbre, mais nous en reparlerons plus tard.
Mais avec le rotor, les choses sont plus intéressantes, comme déjà mentionné, il peut être en court-circuit ou en phase.

Un rotor à cage d'écureuil est un ensemble de tiges métalliques (généralement en aluminium ou en cuivre), dans la figure ci-dessus, elles sont indiquées par le numéro 2, soudées ou remplies dans le noyau (1), fermées par des anneaux (3). Cette conception ressemble à une roue dans laquelle courent des rongeurs domestiques, c'est pourquoi elle est souvent appelée «cage d'écureuil» ou «roue d'écureuil» et ce nom n'est pas de l'argot, mais tout à fait littéraire. Pour réduire les harmoniques plus élevées de l'EMF et la pulsation du champ magnétique, les tiges sont posées non pas le long de l'arbre, mais à un certain angle par rapport à l'axe de rotation.
Le rotor de phase diffère du précédent par le fait qu'il possède déjà trois enroulements, comme sur un stator. Le début des enroulements est relié aux anneaux, généralement en cuivre, ils sont pressés sur l'arbre du moteur. Plus tard, nous expliquerons brièvement pourquoi elles sont nécessaires.

Dans les deux cas, l'une des extrémités de l'arbre est reliée à un mécanisme entraîné par le mouvement, elle est de forme conique ou cylindrique avec ou sans rainures pour installer une bride, une poulie et d'autres pièces mécaniques d'entraînement.
La roue, nécessaire pour le soufflage et le refroidissement, est fixée sur la partie «arrière» de l'arbre, un carter est placé sur le corps au-dessus de la roue. Ainsi, de l'air froid est dirigé le long des nervures du moteur à induction, si pour une raison quelconque, cette roue ne tourne pas, elle surchauffera.

La conception du premier moteur à induction a été développée par M.O. Dolivo-Dobrovolsky et il l'ont breveté en 1889. Sans aucun changement, il a survécu jusqu'à nos jours.
Principe d'opération
Les machines électriques asynchrones sont souvent appelées induction, cela est dû à leur principe de fonctionnement. Tout moteur électrique est entraîné en rotation en raison de l'interaction des champs magnétiques du rotor et du stator, et également grâce à la force de l'ampère. Un champ magnétique, à son tour, peut exister soit autour d'un aimant permanent, soit autour d'un conducteur à travers lequel le courant circule. Mais comment fonctionne exactement une machine asynchrone?
Dans un moteur à induction, contrairement à d'autres, il n'y a pas d'enroulement de champ en soi, alors qu'il a un champ magnétique? La réponse est simple: un moteur à induction est un transformateur.
Considérons le principe de son fonctionnement sur l'exemple d'une machine triphasée, car ce sont elles qui se retrouvent plus souvent que d'autres.
Dans la figure ci-dessous, vous voyez l'emplacement des enroulements sur le noyau du stator d'un moteur asynchrone triphasé.

Du fait de la circulation d'un courant triphasé, un champ magnétique tournant apparaît dans les enroulements du stator. En raison du déphasage, le courant circule dans l'un ou l'autre enroulement, conformément à cela il y a un champ magnétique, dont les pôles sont dirigés selon la règle de la main droite. Et en fonction de la variation de courant dans l'un ou l'autre enroulement, les pôles sont envoyés dans la direction correspondante. Comme l'illustre l'animation suivante:

Dans le cas le plus simple (bipolaire), les enroulements sont empilés de manière à ce que chacun d'eux soit décalé de 120 degrés par rapport au précédent, tout comme l'angle de phase de la tension dans le réseau alternatif.
La vitesse de rotation du champ magnétique du stator est appelée synchrone. En savoir plus sur la façon dont il tourne et pourquoi vous apprendrez de la prochaine vidéo. Notez que dans les moteurs biphasés (à condensateur) et monophasés - il n'est pas rotatif, mais elliptique ou pulsé, et les enroulements ne sont pas 3, mais 2.
Si l'on considère un moteur asynchrone avec un rotor à cage d'écureuil, le champ magnétique du stator induit une EMF dans ses tiges, car elles sont fermées, puis le courant circule.Pour cette raison, un champ magnétique se produit également.
À la suite de l'interaction de deux champs et Force ampèreagissant sur le rotor, il commence à tourner après le champ magnétique tournant du stator, mais il est toujours légèrement en retard sur la vitesse de rotation du stator MP, ce décalage est appelé glissement.
Si la vitesse de rotation du champ magnétique est appelée synchrone, alors la vitesse de rotation du rotor est déjà asynchrone, d'où il a reçu ce nom.
En AD avec un rotor de phase, les choses sont similaires, sauf qu'un rhéostat est connecté à ses anneaux, qui, après que le moteur est entré en mode de fonctionnement, est retiré du circuit et les enroulements sont court-circuités. Ceci est illustré dans le diagramme ci-dessous, mais au lieu d'un rhéostat, des résistances constantes sont utilisées, connectées ou shuntées par des contacteurs KM3, KM2, KM1.
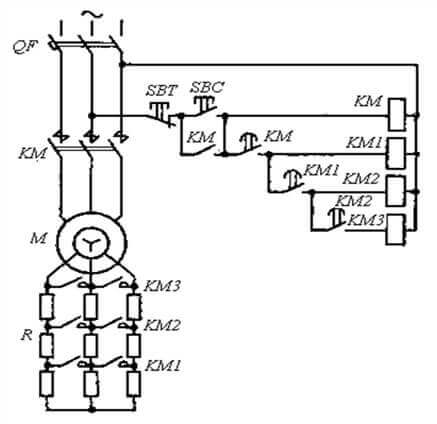
Cette approche permet un démarrage en douceur et de réduire les courants d'appel, en augmentant la résistance électrique active du rotor.
 Pour résumer:
Pour résumer:
- Le courant dans les enroulements du stator génère un champ magnétique.
- Le champ magnétique conduit au courant dans le rotor.
- Le courant dans le rotor fait apparaître un champ autour de lui.
- Puisque le champ du stator tourne, à cause de son champ, le rotor commence à tourner derrière lui.
Vitesse de glissement et de rotation
La fréquence de rotation du champ magnétique du stator (n1) est supérieure à la fréquence de rotation du rotor (n2). La différence entre eux est appelée glissement et est indiquée par la lettre latine S et calculée par la formule:
S = (n1-n2) * 100% / n1
Le glissement n'est pas un inconvénient de ce moteur électrique, car si son arbre tournait à la même fréquence que le champ magnétique du stator (de manière synchrone), aucun courant ne serait induit dans ses tiges, et il ne tournerait tout simplement pas.
Maintenant, sur un concept plus important - la vitesse de rotation du rotor d'un moteur à induction. Cela dépend de 3 valeurs:
- fréquence de la tension d'alimentation (f);
- le nombre de paires de pôles magnétiques (p);
- slip (S).
Le nombre de paires de pôles magnétiques détermine la vitesse de rotation synchrone du champ et dépend du nombre d'enroulements statoriques. Le glissement dépend de la charge et de la conception d'un moteur électrique particulier et se situe entre 3 et 10%, c'est-à-dire que la vitesse asynchrone est très légèrement inférieure à la vitesse synchrone. Eh bien, la fréquence du courant alternatif est fixée à 50 Hz.
Par conséquent, la vitesse de rotation de l'arbre d'un moteur à induction est difficile à réguler, vous ne pouvez affecter que la fréquence du réseau, c'est-à-dire en réglant un convertisseur de fréquence. Il est possible d'abaisser la tension du stator, mais alors la puissance sur l'arbre diminue, néanmoins, une telle technique est utilisée lors du démarrage de l'AM avec la commutation des enroulements de l'étoile au delta pour réduire les courants de démarrage.
La fréquence de rotation du champ statorique (vitesse synchrone) est déterminée par la formule:
n = 60 * f / p
Ainsi, dans un moteur à une paire de pôles magnétiques (deux pôles), la vitesse synchrone est:
60 * 50/1 = 3000 tr / min
Les options les plus courantes pour les moteurs électriques avec:
- une paire de pôles (3000 tr / min);
- deux (1500 tr / min);
- trois (1000 tr / min);
- quatre (750 tr / min).
La vitesse réelle du rotor sera légèrement inférieure, sur un moteur à induction réel, elle est indiquée sur la plaque signalétique, par exemple, ici - 2730 tr / min. Malgré cela, les gens appelleront un tel moteur asynchrone en fonction de la vitesse synchrone ou simplement «trois mille mètres».

Alors son glissement est égal à:
3000-2730*100%/3000=9%
Champ d'application
Le moteur électrique asynchrone a trouvé une application dans tous les domaines de l'activité humaine. Ceux qui sont alimentés par une seule phase (à partir de 220V) se retrouvent dans les actionneurs de faible puissance ou dans les appareils électroménagers et les outils, par exemple:
- dans une machine à laver du type "bébé" et autres anciens modèles soviétiques;
- dans une bétonnière;
- dans le ventilateur;
- dans les bois;
- et même dans les tondeuses à gazon du segment de prix supérieur.



En production dans les réseaux triphasés:
- robinets-vannes automatiques;
- mécanismes de levage (grues et treuils);
- ventilation
- compresseurs;
- Pompes
- machines à bois et à métaux et plus encore.




AD est également utilisé dans les véhicules électriques, et récemment le moteur asynchrone avec un enroulement de type Slavianka et le soi-disant moteur Duyunov sont activement annoncés sur Internet, que vous pouvez découvrir dans la vidéo du développeur.
La portée des moteurs asynchrones est si vaste que la liste à elle seule sera plus longue que cet article, donc tout électricien devrait savoir comment il est organisé, à quoi il sert et où il est utilisé. Pour résumer et énumérer les avantages et les inconvénients de ces appareils.
Avantages:
- Construction simple.
- Faible coût
- Presque pas d'entretien.
Le principal inconvénient est la difficulté d'ajuster la vitesse par rapport aux mêmes moteurs à courant continu ou machines à collecteur universel. En conséquence, il est difficile d'organiser un démarrage en douceur de grandes machines, et le plus souvent cela se fait à l'aide d'un convertisseur de fréquence coûteux.
C'est là que nous terminons avec la considération des moteurs à induction et de leur portée. Nous espérons qu'après avoir lu l'article, vous comprendrez de quoi il s'agit et comment cette machine électrique fonctionne!
Matériaux associés:




