Qu'est-ce qu'un moteur CC sans balais, comment est-il construit et fonctionne-t-il?
Définition
Un moteur à courant continu sans balais est appelé moteur à courant continu, dont le courant dans les enroulements est commuté par un dispositif de commutation spécial - il est appelé «conducteur» ou «inverseur» et ces enroulements sont toujours situés sur le stator. L'interrupteur est composé de 6 transistors, ils fournissent du courant à un enroulement particulier, en fonction de la position du rotor.
Dans la littérature nationale, ces moteurs sont appelés «soupapes» (car les commutateurs à semi-conducteurs sont appelés «soupapes»), et il existe une séparation de ces machines électriques en deux types sous la forme de contre-CEM. Dans la littérature étrangère, une telle différence persiste, l'un d'eux s'appelle de manière similaire au russe "BLDC" (entraînement ou moteur à courant continu sans balais), qui sonne littéralement comme "moteur CC sans balais" dans leurs enroulements, un champ électromagnétique trapézoïdal apparaît. Les moteurs de soupape avec un EMF sinusoïdal sont appelés PMSM (machine synchrone à aimant permanent), qui se traduit par "moteur électrique synchrone avec excitation par des aimants permanents".
L'appareil et le principe de fonctionnement
Le collecteur du KDPT sert de nœud pour commuter le courant dans les enroulements d'induit. Dans un moteur CC sans balais (BDT), ce rôle n'est pas joué par des balais à lamelles, mais par un commutateur, ce sont des commutateurs à semi-conducteurs - des transistors. Les transistors commutent les enroulements du stator, créant un champ magnétique tournant qui interagit avec le champ des aimants du rotor. Et quand le courant passe à travers un conducteur qui est dans un champ magnétique, il agit sur lui Force ampère, du fait de l'action de cette force, un couple est généré sur l'arbre des machines électriques. Le principe de fonctionnement de tout moteur électrique est basé sur cela.
 et du moteur sans balais (à droite)")
Voyons maintenant comment fonctionne le moteur sans balais. 3 enroulements sont généralement situés sur le stator BDPT, par analogie avec les moteurs à courant alternatif, ils sont souvent appelés triphasés. Cela est en partie vrai: les moteurs sans balais sont alimentés par une source de courant continu (souvent à partir de batteries), mais le contrôleur active alternativement les enroulements. Cependant, il n'est pas tout à fait vrai de dire que le courant alternatif traverse les enroulements. La forme finale de l'enroulement de tension d'alimentation est formée par des impulsions de commande de transistor rectangulaires.
Un moteur sans balai triphasé peut être à trois ou quatre fils, où le quatrième fil est un robinet du milieu (si les enroulements sont connectés le long motif d'étoile).

Des enroulements ou, en termes simples, des bobines de fil de cuivre s'insèrent dans les dents du noyau du stator. Selon la conception et le but de l'entraînement, le stator peut avoir un nombre de dents différent. Il existe différentes options pour la distribution des enroulements de phase le long des dents du rotor, ce qui est illustré par la figure suivante.

Les enroulements de chacune des dents dans une phase peuvent être connectés en série ou en parallèle, en fonction des tâches assignées au concepteur en termes de puissance et du moment de l'entraînement conçu, et les enroulements de phase eux-mêmes sont interconnectés selon le motif d'une étoile ou d'un triangle, comme asynchrone ou synchrone moteurs CA triphasés.

Des capteurs de position du rotor peuvent être installés dans le stator. Les capteurs à effet Hall sont souvent utilisés, ils donnent un signal au contrôleur lorsqu'ils sont affectés par le champ magnétique des aimants du rotor. Ceci est nécessaire pour que le contrôleur «sache» dans quelle position se trouve le rotor et pour alimenter les enroulements correspondants. Cela est nécessaire pour augmenter l'efficacité et la stabilité du travail et, en bref, pour extraire toute la puissance possible du moteur. Les capteurs ont généralement installé 3 pièces. Mais la présence de capteurs complique l'appareil d'un moteur sans balais, ils ont besoin de conduire des fils supplémentaires pour les lignes d'alimentation et de données.

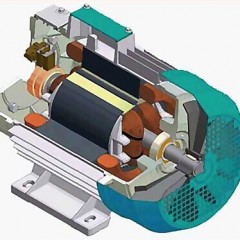
Dans le BDTT, des aimants permanents montés sur le rotor sont utilisés pour l'excitation, et le stator est une ancre. Rappelons que dans les machines collectrices, c'est l'inverse (le rotor est une ancre), et pour l'excitation dans le CD, des aimants permanents et des électroaimants (enroulements) sont utilisés.
Les aimants sont montés avec des pôles alternés, et en conséquence leur nombre détermine le nombre de paires de pôles. Mais cela ne signifie pas que combien d'aimants, puis autant de paires de pôles. Plusieurs aimants peuvent former un pôle. Le nombre de tours par minute dépend du nombre de pôles, comme c'est le cas avec un moteur à induction (et autres). Autrement dit, à partir d'un contrôleur sur les mêmes paramètres, les moteurs sans balais avec un nombre différent de paires de pôles tourneront à des vitesses différentes.

Types de BDTT
Voyons maintenant à quoi ressemblent les moteurs à aimants permanents sans balais. Ils sont classés par la forme du contre-EMF, la conception, ainsi que par la présence de capteurs de position du rotor. Il existe donc deux types principaux qui diffèrent sous la forme de contre-EMF, qui est induit dans les enroulements lorsque le rotor tourne:
- BLDC - en eux un anti-EMF trapézoïdal;
- PMSM - anti-emf sinusoïdal.
Idéalement, ils ont besoin de différentes sources d'alimentation (contrôleurs), mais en pratique, ils sont interchangeables. Mais si vous utilisez un contrôleur avec une tension de sortie rectangulaire ou trapézoïdale avec un moteur PMSM, vous entendrez des sons caractéristiques, similaires à un coup pendant la rotation.
Et par conception, les moteurs CC sans balais sont:
- Avec un rotor interne. Il s'agit d'une représentation plus familière du moteur électrique, lorsque le stator est un corps et que l'arbre qui s'y trouve tourne. Souvent, ils sont appelés le mot anglais "Inrunner". Cette option est généralement utilisée pour les moteurs électriques à grande vitesse.
- Avec un rotor externe. Ici, la partie extérieure du moteur tourne avec un arbre qui y est fixé, dans les sources anglaises, il est appelé "outrunner". Ce circuit d'appareil est utilisé lorsque vous avez besoin d'un moment élevé.
La conception est choisie en fonction de la raison pour laquelle un moteur sans balais est nécessaire dans une application particulière.
 et outrunner (droite)")
L'industrie moderne produit des moteurs sans balais avec et sans capteurs de position de rotor. Le fait est qu'il existe de nombreuses façons de contrôler le BDTT, pour certains des capteurs de position sont nécessaires, d'autres déterminent les positions par EMF dans les enroulements,les troisièmes alimentent simplement les phases nécessaires et le moteur se synchronise indépendamment avec une telle alimentation et passe en mode de fonctionnement.
Caractéristiques principales des moteurs CC sans balais:
- Mode de fonctionnement - long ou court.
- Tension de fonctionnement maximale.
- Courant de travail maximum.
- Puissance maximum.
- Les révolutions maximales, indiquent souvent non pas des révolutions, mais KV - r / v, c'est-à-dire le nombre de révolutions pour 1 volt de la tension appliquée (sans charge sur l'arbre). Pour obtenir la vitesse maximale - multipliez ce nombre par la tension maximale.
- La résistance de l'enroulement (plus elle est petite, plus l'efficacité est élevée) s'élève généralement à des centièmes et millièmes d'Ohm.
- L'angle d'avance de phase (synchronisation) est le temps après lequel le courant dans l'enroulement atteint son maximum, cela est dû à son inductance et à ses lois de commutation (le courant dans l'inductance ne peut pas changer instantanément.
Schéma de câblage
Comme mentionné ci-dessus, pour le fonctionnement d'un moteur sans balais, vous avez besoin d'un contrôleur spécial. Sur aliexpress, vous pouvez trouver les deux kits à partir du moteur et du contrôleur, ou séparément. Le contrôleur est également appelé ESC Motor ou Electric Speed Controller. Ils sont sélectionnés par la force du courant donné à la charge.
La connexion du moteur électrique au contrôleur est généralement simple et compréhensible même pour les nuls. La chose principale que vous devez savoir est que pour changer le sens de rotation, vous devez changer la connexion de deux phases quelconques, en fait, ainsi que dans les moteurs asynchrones ou synchrones triphasés.

Le réseau dispose d'un certain nombre de solutions et de schémas techniques, à la fois complexes et pour les nuls, que vous pouvez voir ci-dessous.
Dans cette vidéo, l'auteur raconte comment se lier d'amitié avec le moteur BC "Arduino".
Et dans cette vidéo, vous découvrirez différentes façons de vous connecter à différents contrôleurs et comment vous pouvez le faire vous-même. L'auteur le démontre avec un exemple de moteur du disque dur et une paire d'instances puissantes - inrunner et outrunner.
Soit dit en passant, nous appliquons également le diagramme de la vidéo pour la répétition:

Là où des moteurs sans balais sont utilisés
La portée de ces moteurs électriques est en avance sur le calendrier. Ils sont utilisés à la fois pour piloter de petits mécanismes: dans les lecteurs de CD, les lecteurs de DVD, les disques durs et dans les appareils puissants: une batterie et un outil électrique (avec une alimentation d'environ 12V), des modèles radiocommandés (par exemple, quadrocoptères), des machines CNC pour entraîner un corps de travail (généralement des moteurs avec une tension nominale de 24V ou 48V).
Les BDTT sont largement utilisés dans les véhicules électriques, presque tous les moteurs-roues modernes des scooters électriques, des vélos, des motos et des voitures sont des moteurs sans balais. Soit dit en passant, la tension nominale des moteurs électriques pour le transport se situe dans une large plage, par exemple, le moteur de roue de vélo fonctionne souvent à 36 V ou 48 V, à de rares exceptions et plus, et dans les voitures, par exemple, la Toyota Prius est d'environ 120 V, et sur la Nissan Leaf - vient à 400, tout en chargeant à partir d'un réseau 220V (ceci est mis en œuvre en utilisant le convertisseur intégré).
En effet, le champ d'application des moteurs électriques sans balais est très étendu, l'absence de noeud collecteur permet de l'utiliser dans des endroits dangereux, ainsi que dans des endroits très humides, sans crainte de courts-circuits, d'étincelles ou d'incendie dus à des défauts de l'ensemble balais. En raison de leur haute efficacité et de leurs bonnes dimensions globales, ils ont trouvé une application dans l'industrie spatiale.
Avantages et inconvénients
Les moteurs à courant continu sans balais, comme d'autres types de machines électriques, présentent certains avantages et inconvénients.
Les avantages du BDTT sont les suivants:
- Grâce à l'excitation par de puissants aimants permanents (néodyme par exemple), ils sont supérieurs en couple et en puissance et ont des dimensions plus petites que les moteurs à induction. Ce qui est utilisé par la plupart des constructeurs de véhicules électriques - des scooters aux voitures.
- Il n'y a aucun ensemble de collecteur de brosse à étincelles qui nécessite un entretien régulier.
- Lorsque vous utilisez un contrôleur de haute qualité, contrairement au même CD, ils n'interfèrent pas avec le réseau d'alimentation, ce qui est particulièrement important dans les appareils radiocommandés et les véhicules dotés d'équipements électroniques avancés dans le réseau embarqué.
- Efficacité supérieure à 80, plus souvent et 90%.
- Vitesse de rotation élevée, dans certains cas jusqu'à 100 000 tr / min.
Mais il y a un inconvénient important: un moteur sans balais sans contrôleur n'est qu'un morceau de fer avec un enroulement en cuivre. Il ne pourra pas travailler. Les contrôleurs ne sont pas bon marché et le plus souvent, ils doivent être commandés dans les magasins en ligne ou avec aliexpress. Pour cette raison, l'utilisation de moteurs BC dans des modèles et appareils faits maison n'est pas toujours possible.
Vous savez maintenant ce qu'est un moteur CC sans balais, comment il fonctionne et où il est utilisé. Nous espérons que notre article vous a aidé à trier tous les problèmes!
Matériaux associés:




Eh bien, après tout, il y a des gens qui non seulement connaissent le matériau, mais qui sont aussi doués par Dieu de la capacité de l'intelligence, de l'intelligence et de ne pas s'ennuyer à l'exposer!
Je lis comme un détective cool!
Un grand merci à l'auteur pour l'article, chaque succès et tout le meilleur de la vie!
👍👍👍👍👍👍👍👍👍👍👍👍👍👍
Je suis d'accord avec tout sauf un. Sur le prius se trouve une batterie asynchrone régulière de 17 kW à 380v qui donne 288 constantes. Eh bien, un peu d'électronique et allons-y