Qu'est-ce qu'un moteur synchrone et où est-il utilisé
Les moteurs électriques synchrones (SD) ne sont pas aussi courants que les moteurs asynchrones à cage d'écureuil. Mais ils sont utilisés là où un couple important est nécessaire et pendant les travaux fréquents surcharge. De plus, ce type de moteur est utilisé là où une grande puissance est nécessaire pour entraîner les mécanismes, en raison du facteur de puissance élevé et de la capacité d'améliorer le facteur de puissance du réseau, ce qui réduira considérablement le coût de l'électricité et de la charge sur la ligne. Qu'est-ce qu'un moteur synchrone, où est-il utilisé et quels sont ses avantages et inconvénients que nous examinerons dans cet article.
Définition et principe d'action
En termes simples, un moteur synchrone est appelé un moteur électrique dont la vitesse de rotation du rotor (arbre) coïncide avec la vitesse de rotation du champ magnétique du stator.
Examinons brièvement le principe de fonctionnement d'un tel moteur électrique - il est basé sur l'interaction d'un champ magnétique statorique rotatif, qui est généralement créé par un courant alternatif triphasé et un champ magnétique constant du rotor.
Le champ magnétique constant du rotor est créé par le bobinage d'excitation ou des aimants permanents. Le courant dans les enroulements du stator crée un champ magnétique tournant, tandis que le rotor en mode de fonctionnement est un aimant permanent, ses pôles se précipitent vers les pôles opposés du champ magnétique du stator. En conséquence, le rotor tourne de manière synchrone avec le champ du stator, ce qui est sa principale caractéristique.
Rappelez-vous que moteur à induction la vitesse de rotation du stator MP et la vitesse de rotation du rotor diffèrent par la quantité de glissement, et sa caractéristique mécanique est "bossue" avec un pic pendant le glissement critique (en dessous de sa vitesse de rotation nominale).
La vitesse de rotation du champ magnétique du stator peut être calculée à l'aide de l'équation suivante:
N = 60f / p
f est la fréquence du courant dans l'enroulement, Hz, p est le nombre de paires de pôles.
En conséquence, la vitesse de rotation de l'arbre du moteur synchrone est déterminée par la même formule.
La plupart des moteurs électriques à courant alternatif utilisés dans la production sont fabriqués sans aimants permanents, mais avec un enroulement d'excitation, tandis que les moteurs à courant alternatif synchrones de faible puissance sont fabriqués avec des aimants permanents sur le rotor.
Le courant à l'enroulement de champ est fourni par des anneaux et un ensemble de balais. Contrairement à un moteur électrique à collecteur, où un collecteur (un ensemble de plaques disposées longitudinalement) est utilisé pour transmettre le courant à une bobine rotative, des anneaux sont montés sur le synchrone à une extrémité du stator.
Les excitateurs à thyristors, souvent appelés "VTE" (du nom de l'une des séries de tels appareils de production domestique) sont actuellement à l'origine de l'excitation en courant continu.Auparavant, le système d'excitation générateur-moteur était utilisé, lorsqu'un générateur était installé sur le même arbre que le moteur (c'est aussi un excitateur), qui résistances courant appliqué à l'enroulement de champ.
Le rotor de presque tous les moteurs CC synchrones est réalisé sans enroulement d'excitation et avec des aimants permanents, bien qu'ils soient similaires en principe aux LED AC, ils sont très différents en termes de connexion et de contrôle à partir de machines triphasées classiques.
L'une des principales caractéristiques d'un moteur électrique est une caractéristique mécanique. Elle synchronise les moteurs près d'une ligne horizontale droite. Cela signifie que la charge sur l'arbre n'affecte pas sa vitesse (jusqu'à ce qu'elle atteigne une valeur critique).
 asynchrones et b) synchrones")
Ceci est réalisé précisément grâce à l'excitation en courant continu, c'est pourquoi le moteur électrique synchrone maintient parfaitement des révolutions constantes sous des charges changeantes, des surcharges et des chutes de tension (jusqu'à une certaine limite).
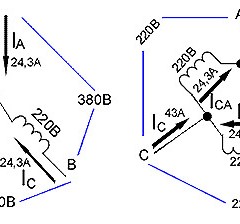
Ci-dessous, vous voyez le symbole sur le schéma de la machine synchrone.

Conception du rotor
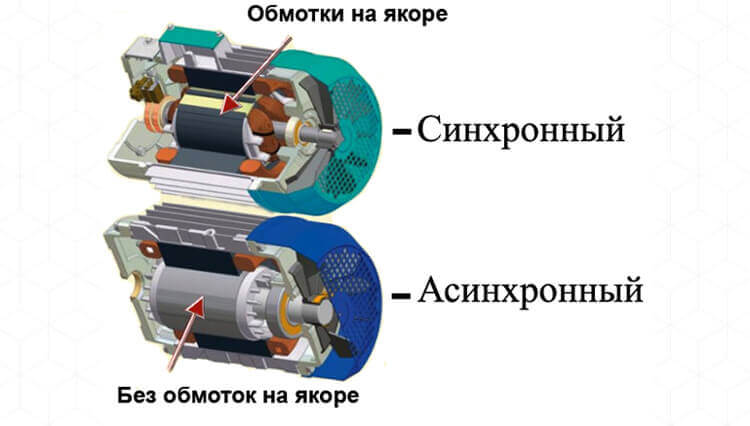
Comme tout autre, un moteur électrique synchrone se compose de deux parties principales:
- Stator. Les enroulements y sont situés. Il est également appelé une ancre.
- Rotor. Des aimants permanents ou un enroulement d'excitation y sont installés. Il est également appelé inducteur, en raison de son objectif - créer un champ magnétique).
Pour fournir du courant à l'enroulement de champ, 2 anneaux sont installés sur le rotor (puisque l'excitation est par courant continu, «+» est fourni à l'un d'eux, et «-» à l'autre). Les brosses sont fixées au porte-balais.

Les rotors des moteurs à courant alternatif synchrones sont de deux types, selon le but:
- Explicitement polaire. Les pôles (bobines) sont clairement visibles. Utilisation à basse vitesse et sur un grand nombre de pôles.
- Implicite - il ressemble à un flan rond, dans la fente sur laquelle les fils des enroulements sont posés. Utilisation à des vitesses de rotation élevées (3000, 1500 tr / min) et un petit nombre de pôles.

Démarrage moteur synchrone
Une caractéristique de ce type de machines électriques est qu'il ne peut pas simplement être connecté au réseau et attendre son lancement. De plus, pour le fonctionnement de la LED, non seulement la source du courant d'excitation est nécessaire, elle possède également un circuit de démarrage assez compliqué.

Le démarrage se produit comme dans un moteur à induction, et pour créer un moment de démarrage, en plus de l'enroulement de champ, un enroulement supplémentaire en «cage d'écureuil» court-circuité est placé sur le rotor. Il est également appelé enroulement «d'amortissement», car il augmente la stabilité lors de surcharges soudaines.
Le courant d'excitation dans l'enroulement du rotor au démarrage est absent et lorsqu'il accélère à une vitesse sous-synchrone (3-5% de moins que synchrone), le courant d'excitation est appliqué, après quoi lui et le courant statorique oscillent, le moteur entre en synchronisme et passe en mode de fonctionnement.
Pour limiter les courants de démarrage des machines puissantes, elles réduisent parfois la tension aux bornes des enroulements statoriques en connectant un autotransformateur ou des résistances en série.
Alors que la machine synchrone démarre en mode asynchrone, des résistances sont connectées à l'enroulement de champ, dont la résistance dépasse de 5 à 10 fois la résistance de l'enroulement lui-même. Ceci est nécessaire pour que le flux magnétique pulsé résultant de l'action des courants induits dans l'enroulement lors du démarrage ne ralentisse pas l'accélération, et également pour ne pas endommager les enroulements dus à la FEM induite en son sein.
Espèce
Il existe de nombreux types de telles machines, la conception d'un moteur à courant alternatif synchrone avec enroulements de champ, comme la plus courante en production, a été décrite ci-dessus. Il existe d'autres types, tels que:
- Moteurs synchrones à aimants permanents. Il s'agit de divers moteurs électriques, tels que PMSM - moteur synchrone à aimant permanent, BLDC - Brushless Direct Current et autres. Les différences entre celles-ci consistent en la méthode de contrôle et la forme du courant (sinusoïdal ou trapézoïdal). Ils sont également appelés moteurs sans balais ou sans balais.Utilisé dans les machines-outils, les modèles radiocommandés, les outils électriques, etc. Ils ne fonctionnent pas directement à partir du courant continu, mais à travers un convertisseur spécial.
- Moteurs pas à pas - moteurs synchrones sans balais, dans lesquels le rotor maintient précisément la position spécifiée, ils sont utilisés pour positionner l'outil de travail dans les machines CNC et pour contrôler divers éléments des systèmes automatiques (par exemple, la position du papillon des gaz dans la voiture). Ils sont constitués d'un stator, dans ce cas, des enroulements d'excitation sont situés dessus, et d'un rotor, qui est fait d'un matériau magnétiquement doux ou magnétiquement dur. Structurellement très similaire aux types précédents.
- Réactif.
- Hystérèse.
- Hystérésis réactive.
Les trois derniers types de LED n'ont pas non plus de balais; ils fonctionnent en raison de la conception spéciale du rotor. Les LED réactives distinguent trois de leurs conceptions: un rotor stratifié transversalement, un rotor à pôles distincts et un rotor stratifié axialement. Une explication du principe de leur travail est assez compliquée, et prendra beaucoup, donc nous allons l'omettre. De tels moteurs dans la pratique, vous rencontrerez probablement rarement. Ce sont principalement des machines de faible puissance utilisées en automatisation.

Champ d'application
Les moteurs synchrones sont plus chers que les moteurs asynchrones, en plus ils nécessitent une source supplémentaire d'excitation en courant continu - cela réduit en partie la largeur de la portée de ce type de machines électriques. Cependant, des moteurs électriques synchrones sont utilisés pour entraîner des mécanismes où des surcharges sont possibles et un maintien précis des révolutions stables est requis.

De plus, ils sont le plus souvent utilisés dans le domaine des grandes capacités - des centaines de kilowatts et des unités de mégawatts, et en même temps, le démarrage et l'arrêt sont plutôt rares, c'est-à-dire que les machines fonctionnent 24 heures sur 24 pendant longtemps. Cette application est due au fait que les machines synchrones fonctionnent avec un cos Ф phi proche de 1 et peuvent fournir une puissance réactive au réseau, ce qui améliore le facteur de puissance du réseau et réduit sa consommation, ce qui est important pour les entreprises.
Avantages et inconvénients
En termes simples, toute voiture électrique a ses avantages et ses inconvénients. Les avantages d'un moteur synchrone sont:
- Travailler avec cos Фи = 1, en raison de l'excitation en courant continu, respectivement, ils ne consomment pas de puissance réactive du réseau.
- Pendant le fonctionnement, avec une surexcitation, ils donnent de la puissance réactive au réseau, améliorant le facteur de puissance du réseau, la chute de tension et les pertes dans celui-ci, et le CM des générateurs des centrales électriques augmente.
- Le moment maximum développé sur l'arbre de la LED est proportionnel à U, et pour l'AD-U² (dépendance quadratique à la tension). Cela signifie que la LED a une bonne capacité de charge et une bonne stabilité, qui sont préservées lors d'une chute de tension dans le réseau.
- En conséquence de tout cela, la vitesse de rotation est stable pendant les surcharges et l'affaissement, dans la capacité de surcharge, en particulier avec l'augmentation du courant d'excitation.
Cependant, un inconvénient important d'un moteur synchrone est que sa conception est plus compliquée que celle d'un asynchrone avec un rotor de court-circuit, un excitateur est nécessaire, sans lequel il ne peut pas fonctionner. Tout cela entraîne un coût plus élevé par rapport aux machines asynchrones et des difficultés de maintenance et de fonctionnement.
Peut-être que les avantages et les inconvénients des moteurs synchrones s'arrêtent là. Dans cet article, nous avons essayé de résumer les informations générales sur les moteurs synchrones. Si vous avez quelque chose à compléter, écrivez dans les commentaires.
Matériaux associés: